
Logiciel libre de géométrie, d'analyse et de simulation multiplateforme par Yves Biton
Toutes les versions de cet article : [English] [Español] [Español] [français]
En este segundo tutorial sobre cálculo matricial, crearemos una figura destinada a resolver un sistema de 3 ecuaciones con 3 incógnitas con coeficientes enteros.
Para ello, debemos utilizar la versión 6.7.3 de MathGraph32 o posterior.
Para evitar lo más tedioso empezaremos con una figura ya preparada y que completaremos.
Hagamos clic en la barra superior en el icono  y usemos Figura por código Base 64.
y usemos Figura por código Base 64.
Utilicemos el código Base 64 a continuación :
TWF0aEdyYXBoSmF2YTEuMAAAABM+TMzNAAJmcv###wEA#wEAAAAAAAAAAAUqAAAC4AAAAQEAAAAAAAAAAQAAABr#####AAAAAQAKQ0NhbGNDb25zdAD#####AAJwaQAWMy4xNDE1OTI2NTM1ODk3OTMyMzg0Nv####8AAAABAApDQ29uc3RhbnRlQAkh+1RELRj#####AAAAAQAHQ0NhbGN1bAD#####AANhMTEAATEAAAABP#AAAAAAAAAAAAACAP####8AA2ExMgABNQAAAAFAFAAAAAAAAAAAAAIA#####wADYTEzAAEzAAAAAUAIAAAAAAAAAAAAAgD#####AANhMjEAATEAAAABP#AAAAAAAAAAAAACAP####8AA2EyMgABMQAAAAE#8AAAAAAAAAAAAAIA#####wADYTIzAAEzAAAAAUAIAAAAAAAAAAAAAgD#####AANhMzEAATEAAAABP#AAAAAAAAAAAAACAP####8AA2EzMgABMQAAAAE#8AAAAAAAAAAAAAIA#####wADYTMzAAEyAAAAAUAAAAAAAAAAAAAAAgD#####AAJiMQABMQAAAAE#8AAAAAAAAAAAAAIA#####wACYjIAATIAAAABQAAAAAAAAAAAAAACAP####8AAmIzAAEzAAAAAUAIAAAAAAAA#####wAAAAQAD0NFZGl0ZXVyRm9ybXVsZQD#####AAAAAAEAAP####8OQEdAAAAAAABAOYUeuFHrhgAAAAAAAgAAAAAAAAABAAAAAAAAAAAAAAABAAkkYV97MTF9PSQAAAAEAAEAAT0BAQAAAAMA#####wAAAAABAAD#####DkBn8AAAAAAAQDmFHrhR64YAAAAAAAIAAAAAAAAAAQAAAAAAAAAAAAAAAgAJJGFfezEyfT0kAAAABAABAAE9AQEAAAADAP####8AAAAAAQAA#####w5AdVgAAAAAAEA3hR64UeuGAAAAAAACAAAAAAAAAAEAAAAAAAAAAAAAAAMACSRhX3sxM309JAAAAAQAAQABPQEBAAAAAwD#####AAAAAAEAAP####8OQEdAAAAAAABAUWFHrhR64gAAAAAAAgAAAAAAAAABAAAAAAAAAAAAAAAEAAkkYV97MjF9PSQAAAAEAAEAAT0BAQAAAAMA#####wAAAAABAAD#####DkBn8AAAAAAAQFFhR64UeuIAAAAAAAIAAAAAAAAAAQAAAAAAAAAAAAAABQAJJGFfezIyfT0kAAAABAABAAE9AQEAAAADAP####8AAAAAAQAA#####w5AdVgAAAAAAEBQYUeuFHriAAAAAAACAAAAAAAAAAEAAAAAAAAAAAAAAAYACSRhX3syM309JAAAAAQAAQABPQEBAAAAAwD#####AAAAAAEAAP####8OQEdAAAAAAABAXGFHrhR64gAAAAAAAgAAAAAAAAABAAAAAAAAAAAAAAAHAAkkYV97MzF9PSQAAAAEAAEAAT0BAQAAAAMA#####wAAAAABAAD#####DkBn0AAAAAAAQFvhR64UeuIAAAAAAAIAAAAAAAAAAQAAAAAAAAAAAAAACAAJJGFfezMyfT0kAAAABAABAAE9AQEAAAADAP####8AAAAAAQAA#####w5AdUgAAAAAAEBa4UeuFHriAAAAAAACAAAAAAAAAAEAAAAAAAAAAAAAAAkACSRhX3szM309JAAAAAQAAQABPQEBAAAAAwD#####AAAAAAEAAP####8OQH6oAAAAAABAOIUeuFHrhgAAAAAAAgAAAAAAAAABAAAAAAAAAAAAAAAKAAYkYl8xPSQAAAAEAAEAAT0BAQAAAAMA#####wAAAAABAAD#####DkB+mAAAAAAAQFAhR64UeuIAAAAAAAIAAAAAAAAAAQAAAAAAAAAAAAAACwAGJGJfMj0kAAAABAABAAE9AQEAAAADAP####8AAAAAAQAA#####w5AfpgAAAAAAEBaIUeuFHriAAAAAAACAAAAAAAAAAEAAAAAAAAAAAAAAAwABiRiXzM9JAAAAAQAAQABPQEB#####wAAAAIADENDb21tZW50YWlyZQD#####AP8AAAEAAP####8QQDOAAAAAAABAeKhR64UeuAAAAAAAAAAAAAAAAAABAAAAAAAAAAAA8E4nZW50cmV6IGNvbW1lIGNvZWZmaWNpZW50cyBxdWUgZGVzIG5vbWJyZXMgZW50aWVycy4KTGEgc29sdXRpb24gc2VyYSBlbmNvcmUgYm9ubmUgc2kgbGVzIGNvZWZmaWNpZW50cwpzb250IGRlcyBub21icmVzIHJhdGlvbm5lbHMgbWFpcyBsJ2FmZmljaGFnZQpkdSBzeXN0w6htZSBzZXJhIGFwcHJvY2jDqSAobWFpcyDDoCBjb25kaXRpb24gcXVlCmxlcyBjb2VmZmljaWVudHMgcmVzdGVudCBhc3NleiAic2ltcGxlcyIpLv###############w==En esta figura han sido creados los cálculos $a_{11},a_{12},a_{13},a_{21},a_{22},a_{23},a_{31},a_{32},a_{33}$ que son los coeficientes del sistema y los cálculos $b_1,b_2,b_3$ que son los términos constantes de la derecha.
Esta figura también contiene editores de fórmulas asociados con todos estos coeficientes.
Ahora queremos mostrar el sistema a resolver en una visualización LaTeX.
Para eso vamos a crear tres funciones reales de 3 variables.
Desplegamos la barra de herramientas de cálculos y hacemos clic con el botón derecho en el icono  .
.
De la lista, elegimos Función real de tres variables y completamos el cuadro de diálogo como se muestra a continuación.
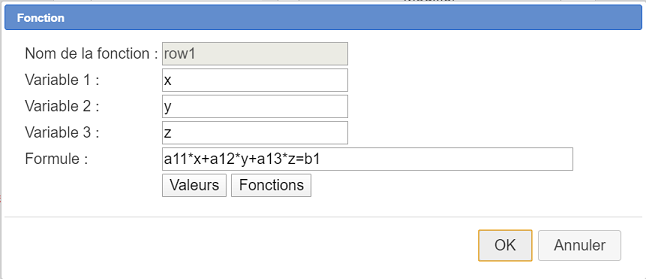
A continuación se muestra la fórmula para ingresar para la función row1 :
a11*x+a12*y+a13*z=b1
Procedemos de la misma manera para crear una función de 3 variables llamada row2 con la fórmula :
a21*x+a22*y+a23*z=b2
Y una función de 3 variables llamada row3 con la fórmula :
a31*x+a32*y+a33*z=b3
Ahora vamos a crear una visualización LaTeX para mostrar el sistema.
Desplegamos la barra de herramientas de visualización y hacemos clic en el icono 
Hacemos clic debajo de los editores de fórmulas a la izquierda de la figura y usamos el código LaTeX siguiente (podemos usar el botón  y cliquear sobre el botón Inserción de fórmula).
y cliquear sobre el botón Inserción de fórmula).
Code LaTeX :
\text{Système : }
\left\{ \begin{array}{l}
\ForSimp{row1}
\\ \ForSimp{row2}
\\ \ForSimp{row3}
\end{array} \right.Ahora vamos a crear una matriz A cuyos términos serán los coeficientes del sistema.
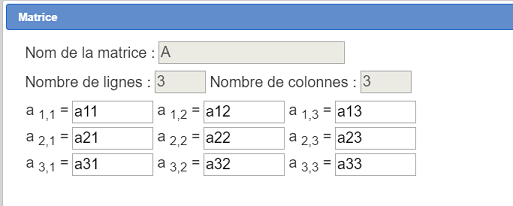
Desplegamos la barra de herramientas de cálculos y hacemos clic con el botón derecho en el icono .
De la lista, elegimos Matriz y completamos el cuadro de diálogo como se muestra a continuación para crear la matriz A.
Nuevamente creamos una matriz B como se muestra a continuación :
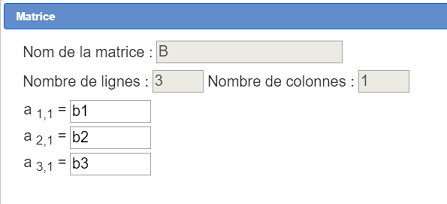
Por tanto, el sistema a resolver es A /times X = B donde X es la matriz desconocida.
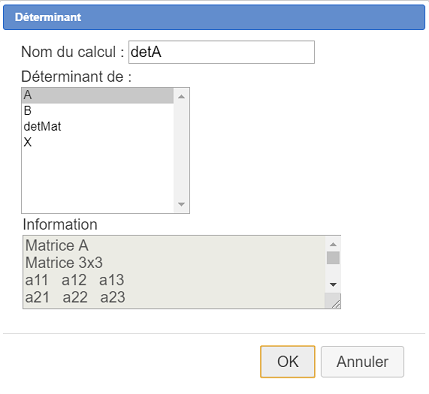
Para saber si este sistema admite una única solución vamos a calcular el determinante de la matriz A.
Desplegamos la barra de herramientas de cálculos y hacemos clic con el botón derecho en el icono .
De la lista, elegimos Determinante y completamos el cuadro de diálogo como se muestra a continuación (el nombre elegido es detA).
De la barra de herramientas de cálculos, usamos el icono  para crear un cálculo real llamado detnul con la siguiente fórmula :
para crear un cálculo real llamado detnul con la siguiente fórmula :
detA=0
Ahora creemos un cálculo matricial llamado X que contiene la solución del sistema cuando existe y es único.
Desplegamos la barra de herramientas de cálculos y hacemos clic derecho sobre el icono .
De la lista, elegimos Cálculo matricial y completamos el cuadro de diálogo como se muestra a continuación.
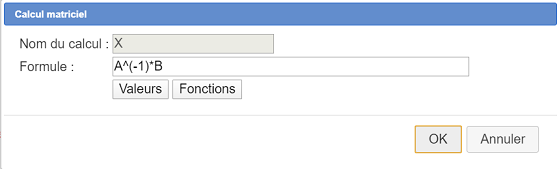
El nombre del cálculo de la matriz es X. La fórmula para ingresar es la siguiente :
A^(-1)*B
A^(-1) representa la matriz inversa de A (si es invertible).
Todavía tenemos que crear una visualización LaTeX para mostrar la solución.
Esta visualización LaTeX contendrá una pantalla condicional dependiendo de si detnul es 1 (solo una solución) o no.
Desplegamos la barra de herramientas de visualizaciones y hacemos clic en el icono .
Hacemos clic debajo de la vista LaTeX anterior que muestra al sistema y usamos el siguiente código LaTeX :
\If{detnul}
{
\text{El sistema no tiene una única terna solución}
}
{
\begin{array}{l}
\text{El sistema tiene una única terna solución}
\\ \left( \begin{array}{l}
x
\\ y
\\ z
\end{array} \right)
= \left( \ValFrac{X} \right)
\end{array}
}Nota : Esta visualización LaTeX utiliza un código LaTeX específico de MathGraph32 \ValFrac.
Este código muestra la matriz A con cada término reemplazado por su aproximación racional al 10 ^ (- 12) más cercano. Por lo tanto, si los coeficientes no son demasiado grandes, la solución mostrada será exacta.
Aquí está el código Base 64 de la figura final :
TWF0aEdyYXBoSmF2YTEuMAAAABM+TMzNAAJmcv###wEA#wEAAAAAAAAAAAUqAAAC4AAAAQEAAAAAAAAAAQAAACb#####AAAAAQAKQ0NhbGNDb25zdAD#####AAJwaQAWMy4xNDE1OTI2NTM1ODk3OTMyMzg0Nv####8AAAABAApDQ29uc3RhbnRlQAkh+1RELRj#####AAAAAQAHQ0NhbGN1bAD#####AANhMTEAATEAAAABP#AAAAAAAAAAAAACAP####8AA2ExMgABNQAAAAFAFAAAAAAAAAAAAAIA#####wADYTEzAAEzAAAAAUAIAAAAAAAAAAAAAgD#####AANhMjEAATEAAAABP#AAAAAAAAAAAAACAP####8AA2EyMgABMQAAAAE#8AAAAAAAAAAAAAIA#####wADYTIzAAEzAAAAAUAIAAAAAAAAAAAAAgD#####AANhMzEAATEAAAABP#AAAAAAAAAAAAACAP####8AA2EzMgABMQAAAAE#8AAAAAAAAAAAAAIA#####wADYTMzAAEyAAAAAUAAAAAAAAAAAAAAAgD#####AAJiMQABMQAAAAE#8AAAAAAAAAAAAAIA#####wACYjIAATIAAAABQAAAAAAAAAAAAAACAP####8AAmIzAAEzAAAAAUAIAAAAAAAA#####wAAAAEACUNGb25jTlZhcgD#####AARyb3cxABRhMTEqeCthMTIqeSthMTMqej1iMf####8AAAABAApDT3BlcmF0aW9uCAAAAAQAAAAABAAAAAAEAv####8AAAABAA9DUmVzdWx0YXRWYWxldXIAAAAB#####wAAAAIAEUNWYXJpYWJsZUZvcm1lbGxlAAAAAAAAAAQCAAAABQAAAAIAAAAGAAAAAQAAAAQCAAAABQAAAAMAAAAGAAAAAgAAAAUAAAAKAAAAAwABeAABeQABegAAAAMA#####wAEcm93MgAUYTIxKngrYTIyKnkrYTIzKno9YjIAAAAECAAAAAQAAAAABAAAAAAEAgAAAAUAAAAEAAAABgAAAAAAAAAEAgAAAAUAAAAFAAAABgAAAAEAAAAEAgAAAAUAAAAGAAAABgAAAAIAAAAFAAAACwAAAAMAAXgAAXkAAXoAAAADAP####8ABHJvdzMAFGEzMSp4K2EzMip5K2EzMyp6PWIzAAAABAgAAAAEAAAAAAQAAAAABAIAAAAFAAAABwAAAAYAAAAAAAAABAIAAAAFAAAACAAAAAYAAAABAAAABAIAAAAFAAAACQAAAAYAAAACAAAABQAAAAwAAAADAAF4AAF5AAF6#####wAAAAQAD0NFZGl0ZXVyRm9ybXVsZQD#####AAAAAAEAAP####8OQEdAAAAAAABAOYUeuFHrhgAAAAAAAgAAAAAAAAABAAAAAAAAAAAAAAABAAkkYV97MTF9PSQAAAAEAAEAAT0BAQAAAAcA#####wAAAAABAAD#####DkBn8AAAAAAAQDmFHrhR64YAAAAAAAIAAAAAAAAAAQAAAAAAAAAAAAAAAgAJJGFfezEyfT0kAAAABAABAAE9AQEAAAAHAP####8AAAAAAQAA#####w5AdVgAAAAAAEA3hR64UeuGAAAAAAACAAAAAAAAAAEAAAAAAAAAAAAAAAMACSRhX3sxM309JAAAAAQAAQABPQEBAAAABwD#####AAAAAAEAAP####8OQEdAAAAAAABAUWFHrhR64gAAAAAAAgAAAAAAAAABAAAAAAAAAAAAAAAEAAkkYV97MjF9PSQAAAAEAAEAAT0BAQAAAAcA#####wAAAAABAAD#####DkBn8AAAAAAAQFFhR64UeuIAAAAAAAIAAAAAAAAAAQAAAAAAAAAAAAAABQAJJGFfezIyfT0kAAAABAABAAE9AQEAAAAHAP####8AAAAAAQAA#####w5AdVgAAAAAAEBQYUeuFHriAAAAAAACAAAAAAAAAAEAAAAAAAAAAAAAAAYACSRhX3syM309JAAAAAQAAQABPQEBAAAABwD#####AAAAAAEAAP####8OQEdAAAAAAABAXGFHrhR64gAAAAAAAgAAAAAAAAABAAAAAAAAAAAAAAAHAAkkYV97MzF9PSQAAAAEAAEAAT0BAQAAAAcA#####wAAAAABAAD#####DkBn0AAAAAAAQFvhR64UeuIAAAAAAAIAAAAAAAAAAQAAAAAAAAAAAAAACAAJJGFfezMyfT0kAAAABAABAAE9AQEAAAAHAP####8AAAAAAQAA#####w5AdUgAAAAAAEBa4UeuFHriAAAAAAACAAAAAAAAAAEAAAAAAAAAAAAAAAkACSRhX3szM309JAAAAAQAAQABPQEBAAAABwD#####AAAAAAEAAP####8OQH6oAAAAAABAOIUeuFHrhgAAAAAAAgAAAAAAAAABAAAAAAAAAAAAAAAKAAYkYl8xPSQAAAAEAAEAAT0BAQAAAAcA#####wAAAAABAAD#####DkB+mAAAAAAAQFAhR64UeuIAAAAAAAIAAAAAAAAAAQAAAAAAAAAAAAAACwAGJGJfMj0kAAAABAABAAE9AQEAAAAHAP####8AAAAAAQAA#####w5AfpgAAAAAAEBaIUeuFHriAAAAAAACAAAAAAAAAAEAAAAAAAAAAAAAAAwABiRiXzM9JAAAAAQAAQABPQEB#####wAAAAIABkNMYXRleAD#####AAAAAAEAAP####8QQC0AAAAAAABAY#Cj1wo9cQAAAAAAAAAAAAAAAAABAAAAAAAAAAAAc1x0ZXh0e1N5c3TDqG1lIDogfQpcbGVmdFx7IFxiZWdpbnthcnJheX17bH0KXEZvclNpbXB7cm93MX0gClxcIFxGb3JTaW1we3JvdzJ9ClxcIFxGb3JTaW1we3JvdzN9ClxlbmR7YXJyYXl9IFxyaWdodC7#####AAAAAQAIQ01hdHJpY2UA#####wABQQAAAAMAAAADAAAABQAAAAEAAAAFAAAAAgAAAAUAAAADAAAABQAAAAQAAAAFAAAABQAAAAUAAAAGAAAABQAAAAcAAAAFAAAACAAAAAUAAAAJAAAACQD#####AAFCAAAAAwAAAAEAAAAFAAAACgAAAAUAAAALAAAABQAAAAz#####AAAAAQAUQ0ltcGxlbWVudGF0aW9uUHJvdG8A#####wAMRMOpdGVybWluYW50AAAAAQAAAAEAAAABAAAAHf####8AAAABAAhDQ2FsY01hdAAAAAAfAAZkZXRNYXQACGRldGVyKEEp#####wAAAAIACUNGb25jdGlvbhcAAAAFAAAAHQAAAAIBAAAAHwAEZGV0QQALZGV0TWF0KDEsMSn#####AAAAAQAIQ1Rlcm1NYXQAAAAgAAAAAT#wAAAAAAAAAAAAAT#wAAAAAAAAAAAAAgD#####AAZkZXRudWwABmRldEE9MAAAAAQIAAAABQAAACEAAAABAAAAAAAAAAAAAAALAP####8AAVgACEFeKC0xKSpCAAAABAL#####AAAAAQAKQ1B1aXNzYW5jZQAAAAUAAAAd#####wAAAAEADENNb2luc1VuYWlyZQAAAAE#8AAAAAAAAAAAAAUAAAAeAAAACAD#####AAAAAAEAAP####8QQCkAAAAAAABAcShR64UeuAAAAAAAAAAAAAAAAAABAAAAAAAAAAAA7FxJZntkZXRudWx9CnsKXHRleHR7TGUgc3lzdMOobWUgbidhIHBhcyB1biBzZXVsIHRyaXBsZXQgc29sdXRpb259Cn0KewpcYmVnaW57YXJyYXl9e2x9Clx0ZXh0e0xlIHN5c3TDqG1lIGEgdW4gc2V1bCB0cmlwbGV0IHNvbHV0aW9ufQpcXCBcbGVmdCggXGJlZ2lue2FycmF5fXtsfQp4IApcXCB5ClxcIHoKXGVuZHthcnJheX0gXHJpZ2h0KQo9ICBcbGVmdCggXFZhbEZyYWN7WH0gXHJpZ2h0KQpcZW5ke2FycmF5fQp9#####wAAAAIADENDb21tZW50YWlyZQD#####AP8AAAEAAP####8QQDOAAAAAAABAeKhR64UeuAAAAAAAAAAAAAAAAAABAAAAAAAAAAAA8E4nZW50cmV6IGNvbW1lIGNvZWZmaWNpZW50cyBxdWUgZGVzIG5vbWJyZXMgZW50aWVycy4KTGEgc29sdXRpb24gc2VyYSBlbmNvcmUgYm9ubmUgc2kgbGVzIGNvZWZmaWNpZW50cwpzb250IGRlcyBub21icmVzIHJhdGlvbm5lbHMgbWFpcyBsJ2FmZmljaGFnZQpkdSBzeXN0w6htZSBzZXJhIGFwcHJvY2jDqSAobWFpcyDDoCBjb25kaXRpb24gcXVlCmxlcyBjb2VmZmljaWVudHMgcmVzdGVudCBhc3NleiAic2ltcGxlcyIpLv###############w==Podemos ver la figura final a continuación.
 Accueil
Accueil
 Présentation
Présentation
 FAQ
FAQ Contact
Contact

